Como lector de ciencia ficción, siempre me fascinó la posibilidad de mezclar elementos mecánicos y biológicos a un nivel tan profundo que se pudieran diseñar los biológicos. Investigaciones (relativamente) recientes publicadas en la revista Science Robotics han dado un paso más en esa dirección, al publicar como un grupo de investigadores diseñaron un robot que emplea músculos y esqueletos vivos diseñados en laboratorio para nadar.
Comienza en la introducción estableciendo algo muy obvio: los seres vivos somos muy complicados y realizamos una gran cantidad de tareas complejas de auto-organización de materia, curación, movimiento y sensoras. Explica que la robótica blanda biomimética(1) pretende precisamente imitar estos comportamientos complejos, pero con éxito relativo hasta ahora. Según el artículo, ya se han logrado robots que combinan tejidos vivos capaces de arrastrarse por el suelo o coger cosas, pero sin las capacidades de casi cualquier ser vivo.
Sigue el artículo diciendo que una de las áreas más investigadas es la consecución de músculos artificiales, donde hay una gran cantidad de avances pero que todavía se quedan lejos de las capacidades de los tejidos vivos en cuanto a consumo energético, capacidad de auto-regeneración, etc. Por eso estos investigadores, y otros, tomaron el camino de usar tejidos vivos combinados con materiales artificiales, que generalmente se usan como control o apoyo estructural.
También comentan que ya hay varios ejemplos publicados de robots que emplean células musculares cardíacas, generalmente en estructuras bidimensionales, para realizar control de movimiento, medir/sentir algún tipo de fuerza, etc. Su mayor ventaja reside en que su control es más sencillo, porque una vez que se las estimula con la frecuencia adecuada, no paran de moverse. Al mismo tiempo, ése es su mayor inconveniente. Por eso, algunos investigadores trataron de usar células musculares «normales», es decir, de músculos asociados a huesos, porque además estas células pueden configurarse tridimensionalmente en estructuras mucho más complejas que las cardíacas.
Generalmente el uso de células musculares normales se asocia a robots que andan o se arrastran, pues según los autores del artículo son estos los avances logrados hasta ahora. Por eso su bio-robot(2) que emplea una estructura en muelle como «esqueleto» de un conjunto de células musculares normales para poder nadar es un avance importante. El robot que este grupo diseñó puede nadar y moverse porque la estructura de muelle que soporta las células tiene una rigidez asimétrica, de tal forma que la contracción de las células musculares produce dos tipos de movimiento diferenciado en el robot, según dónde se encuentre: nadar en la superficie aire-líquido y bucear(3) cerca del fondo del líquido. Con esta estructura crearon el robot más rápido hasta la fecha realizado con este método de fabricación. Se mueve más o menos a la misma velocidad que robots basados en células cardíacas, que son mucho más rápidos que los basados en células musculares gracias a su mayor capacidad de oscilación.
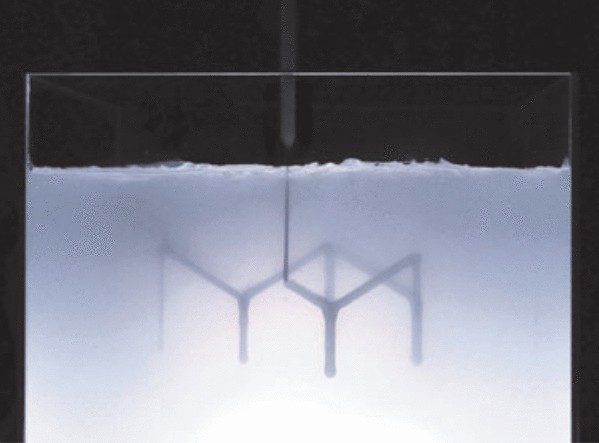
En la siguiente sección de resultados explican como lo hicieron y la forma que tiene, y me parece espectacular. Usaron técnicas de impresión en 3D, impresión aditiva, para imprimir tanto el «esqueleto» como un conjunto de hidrogel donde se hicieron crecer las células musculares, como muestra la siguiente figura:

Para hacer el esqueleto emplearon un plástico, el PDMS(4), mientras que las células musculares que forman el anillo exterior se integraron en una matriz de hidrogel para poder primero darle forma y luego que en el proceso de secado se mantuvieran fijas.

Bio-robot real. La escala blanca de abajo es de 3 mm. Se aprecia el tejido muscular en forma de banda alrededor del «esqueleto» plástico, y las dos oscilaciones internas del mismo que le permiten moverse bien. Tuvieron que hacer varias pruebas hasta lograr que las células musculares pudieran moverse bien con el esqueleto. La foto viene de la fig. 2 del artículo citado.
Tras explicar cómo montaron el esqueleto, explican también qué materiales introdujeron en el hidrogel para permitir que las células que inyectaron se quedaran quietas y no murieran, además de describir el proceso empleado para hacer crecer las células, un proceso largo que aquí no quiero reseñar. Sólo comentar que no es nada inmediato y que requiere paciencia: un mínimo de tres días hacen falta para dejar crecer las células iniciales que luego se transformarán en el músculo. Todo el proceso lleva de 4 a 8 días.
La mecánica del desplazamiento y movimiento del bio-robot es sencilla: cuando mediante estimulación eléctrica el músculo se contrae, las vueltas del esqueleto se acortan, y cuando se permite al músculo relajarse, se vuelven a alargar. La imagen siguiente lo muestra muy bien:

Para llegar esta configuración, realizaron simulaciones y estudios del «esqueleto» con modelos de elementos finitos, para ver qué configuración era capaz de moverse mejor. Vieron tres modelos con diferentes curvaturas en las dos bobinas internas que emplearon, prestando mucha atención a la distribución de fuerzas en la estrucutura en contracción, dado que fuerzas muy localizadas podían dañar el tejido. Por otra parte, algún tipo de asimetría en las fuerzas ejercidas sobre el tejido muscular es bueno, dado que promueve el crecimiento de tejido capaz de moverse mejor y es la clave para el movimiento final del bio-robot: si se contrajera y expandiera de manera totalmente simétrica nunca podría moverse. Para comprobar que la asimetría producida por su diseño era clave en este movimiento, usaron las mismas técnicas experimentales, pero con un «esqueleto» que eran dos pares de palos enfrentados, lo que tiene una simetría mucho mayor que su diseño. El resultado fue que el tejido muscular no se podía mover de manera regular, lo que confirmó la idea de los investigadores, ya probada en experimentos previos por otra gente, de que era fundamental la asimetría en el sistema esqueletal.
Al estudiar con más detalle su bio-robot, vieron que si bien se podía mover siempre que hubiera una cierta ruptura de simetría en el sistema de soporte o esqueleto, para lograr cierto control sobre ese movimiento tenían que poder controlar la asimetría que se produjo. Este control se lograba al fabricarlo, controlando la rigidez del plástico empleado en cada parte del soporte.
Explican después las características hidrodinámicas del movimiento del bio-robot, diciendo que a muy bajos números de Reynolds nada puede moverse en un líquido a menos que ese movimiento tenga una cierta asimetría. En la naturaleza, las bacterias alcanzan esa asimetría mediante movimiento rotatorios de sus flagelos. Estimando el valor del número de Reynolds(5) de su robot llegan a un valor entre 1 y 5, que es muy bajo, por lo que las asimetrías en la contracción y el movimiento del fluido alrededor del bio-robot son la clave para su movimiento, algo que confirmaron mediante el empleo de simulaciones hidrodinámicas.
La última sección del artículo trata de resumir lo que han conseguido y explican la importancia de la ruptura de simetría controlada en lograr el movimiento de su sistema, destacando la rapidez que tiene al moverse y cómo los siguientes pasos son lograr que su bio-robot sea compatible con más fluidos que los del laboratorio y mejoras en el control de los bio-robots, de momento muy crudo y basado en moverse o no.
El artículo se publicó en la revista Science Robotics, que no es accesible sin pagar. Pero los autores publicaron una versión previa del artículo, casi seguro que prácticamente idéntica a la original, que es la que yo reseño aquí. Está accesible en los prepints de bioRxiv, un repositorio de artículos relacionados con la biología: Bio-hybrid soft robots with self-stimulating skeletons.
Notas:
(1) La robótica blanda biomimética es la rama de la robótica que, usando tejidos blandos naturales o artificiales, trata de imitar y lograr las capacidades de los seres vivos, pero diseñadas y comprendidas desde el laboratorio. Tiene un uso fundamental en medicina, porque los robots en instrumentos tradicionales no siempre se pueden introducir en el cuerpo humano, bastante más blando que los metales o plásticos que se usan tradicionalmente en robótica.
(2) Bio-robots es la palabra empleada en el artículo para definir los robots construidos de manera artificial, pero con la unión de tejidos vivos, también alterados genéticamente para cumplir una determinada misión.
(3) La palabra que emplean en inglés es «coasting», que se puede traducir como dejarse ir sin apenas influir en el movimiento, pero como este bio-robot tiene que moverse para realizar este tipo de actuación, preferí traducirlo por bucear.
(4) PDMS: Polidimetilsiloxano. Un polímero que se puede introducir de manera segura en el cuerpo, que se puede fabricar con viscosidades muy distintas. El artículo en español de la Wikipedia es muy bueno y completo: Wiki:PDMS.
(5) El número de Reynolds es un valor adimensional que explicita la relación entre las fuerzas de movimiento y rozamiento en cualquier sistema donde haya un fluido en movimiento.